[toc]
EfficientDet学习笔记
前言
最近才开始为了项目应用做深度学习,前几天训练SSD模型,没过几天同学推荐我去看EfficientDet模型,据说是最强单阶段模型?这两天我就来研究一下。
预备知识
EfficientDet的贡献之一就是提出了BIFPN,那么什么是BIFPN,先来了解什么是FPN。
FPN
Feature Pyramid Networks for Object Detection (简称FPN),目标检测的特征金字塔网络,是用于提取特征的一种方法。提出FPN的作者所做的实验主要是基于Faster R-CNN。
Faster R-CNN
看这篇文章理解Faster R-CNN。
RPN网络
Faster R-CNN中的RPN网络,首先对 backbone 提取出的 feature maps 进行3×3的卷积,相当于每个点又融合周围9个点的特征,然后使用1×1卷积生成大小与anchor数量、每个anchor对应的属性(样本为正还是为负的二分类、regression使用的位置预测信息)数量相对应的特征矩阵。小结,RPN网络输出为:
- 大小为
50×38×2k的positive/negative softmax分类特征矩阵 - 大小为
50×38×4k的regression坐标回归特征矩阵
其中,k为 feature map 中每个位置的anchor数量,50×38为 VGG 输出的 feature map size。
特征金字塔网络FPN
论文地址:https://arxiv.org/abs/1612.03144
FPN 主要解决的是物体检测中的多尺度问题,通过简单的网络连接改变,在基本不增加原有模型计算量情况下,大幅度提升了小物体检测的性能。
理解:小物体检测是通过在浅层 feature map 上设置 anchors 来实现的,然而浅层 feature map 中全局语义信息较少,使得对目标的识别效果并不好,而深层次的 feature map 具有很强的语义信息,使得识别的效果比使用浅层 feature map 效果要好。
在物体检测里面,有限计算量情况下,网络的深度(对应到感受野)与 stride 通常是一对矛盾的东西,常用的网络结构对应的 stride 一般会比较大(如 32),而图像中的小物体甚至会小于 stride 的大小,造成的结果就是小物体的检测性能急剧下降。传统解决这个问题的思路包括:(1)多尺度训练和测试,又称图像金字塔,如图 1(a) 所示。目前几乎所有在 ImageNet 和 COCO 检测任务上取得好成绩的方法都使用了图像金字塔方法。然而这样的方法由于很高的时间及计算量消耗,难以在实际中应用。(2)特征分层,即每层分别预测对应的 scale 分辨率的检测结果。如图 1(c) 所示。SSD 检测框架采用了类似的思想。这样的方法问题在于直接强行让不同层学习同样的语义信息。而对于卷积神经网络而言,不同深度对应着不同层次的语义特征,浅层网络分辨率高,学的更多是细节特征,深层网络分辨率低,学的更多是语义特征。
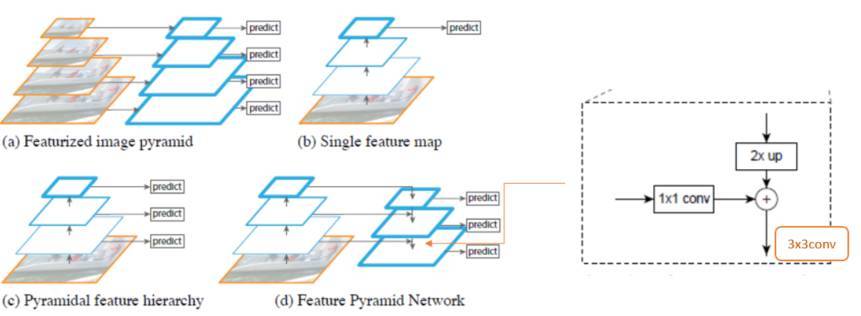
对上图中四幅图进行一个简单的概括:
(a). Featurized image pyramid,翻译为图像金字塔,实际上是通过把同一张图片缩放到不同尺寸并输入网络,对不同尺寸的版本分别进行预测,也就是多尺度训练和测试。这样的确精度很高,但是计算量过大;
(b). Single feature map,只对最后一层 feature map 进行预测,缺点在于深层的网络分辨率较低,对于定位来说并不能做到很好的效果,且不利于小目标检测;
(c). Pyramidal feature hierarchy,金字塔特征分层,SSD采用了类似思想,每一层分别承担对应尺度对象的预测任务,其问题在于,不同层次的神经网络学习的特征不同,浅层学习细节特征,深层学习语义特征;
(d). Feature Pyramid Network,即为文章提出的特征金字塔网络,融合相邻的不同尺度的 feature map 中的语义信息。
FPN的提出是基于以下三个问题:
- 如何学习具有强语义信息的多尺度特征表示?
- 如何设计通用的特征表示来解决物体检测中的多个子问题?如 object proposal, box localization, instance segmentation.
- 如何高效计算多尺度的特征表示?
针对上述问题,文章为每个分辨率的 feature map 引入后一个分辨率缩放两倍的 feature map,并进行 element-wise 相加。通过这样的连接,每一层预测所用的 feature map 都融合了不同分辨率、不同语义强度的特征,融合的不同分辨率的 feature map 分别做对应分辨率大小的物体检测。这样保证了每一层都有合适的分辨率以及强语义特征。同时,由于此方法只是在原网络基础上加上了额外的跨层连接,在实际应用中几乎不增加额外的时间和计算量。
EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks
论文链接:https://arxiv.org/abs/1905.11946
这篇ICML2019的论文对目前分类网络的优化提出更加泛化的思想,认为目前常用的加宽网络、加深网络和增加分辨率这3种常用的提升网络指标的方式之间不应该是相互独立的。因此提出了 compound model scaling 算法,通过综合优化网络宽度、网络深度和分辨率达到指标提升的目的,能够达到准确率指标和现有分类网络相似的情况下,大大减少模型参数量和计算量。
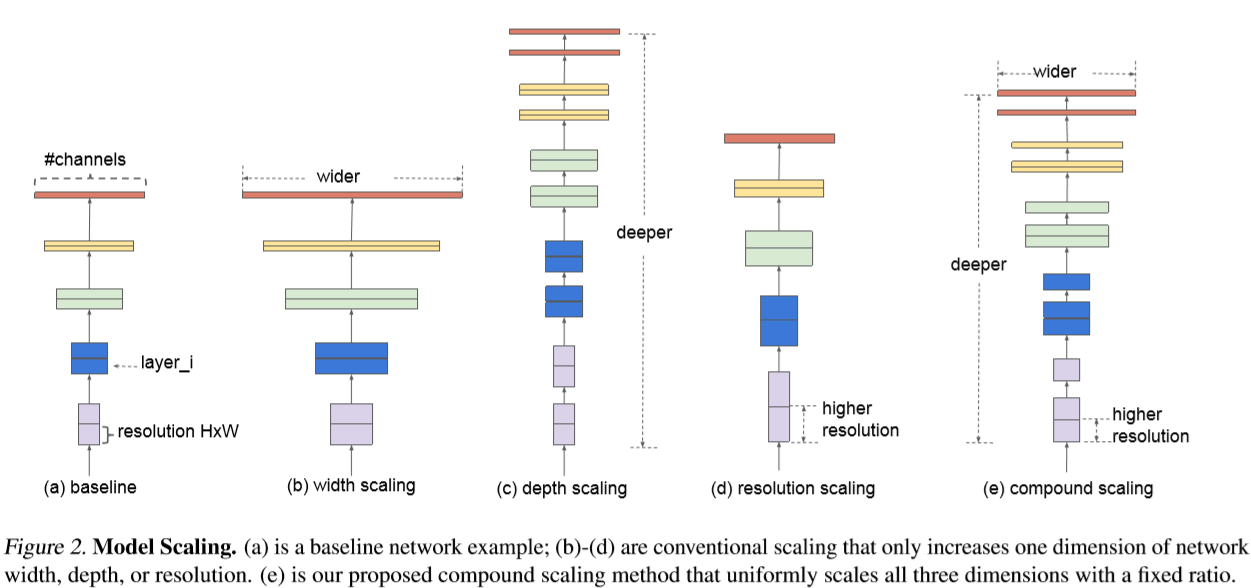
直观地说,depth scaling是调整网络的深度,width scaling是调整卷积层中feature map的数量,resolution scaling是调整输入图像分辨率的大小,分别对应上图 (b) (c) (d)。
调整网络深度是最常见的 scaling,比如 ResNet-18/50/200 等。但为什么这样做呢?直觉的解释是深的网络有更强的特征提取能力和泛化能力(没很好的理论解释)。
调整网络宽度是另一种常用的 scaling。更宽的网络趋向于捕捉 fine-grained features (小粒度特征),而且浅层的网络更容易训练。但问题是很宽但很浅的网络更容易精度饱和(accuracy saturation)。
调整输入图像的分辨率。高分辨率的图像能有更fine-grained特征,从而应该有更好的性能,但是,随着不断的提升图像分辨率,精度的提升逐渐变得很小。
那么如果不再对单一维度进行 scaling,而是将三个维度结合起来呢?这篇文章便是针对这个问题做了充分的实验。
In particular, we investigate the central question: is there a principled method to scale up ConvNets that can achieve better accuracy and efficiency? Our empirical study shows that it is critical to balance all dimensions of network width/depth/resolution, and surprisingly such balance can be achieved by simply scaling each of them with constant ratio. Based on this observation, we propose a simple yet effective compound scaling method.
文章使用了统一的方法,用固定参数对三个维度进行 scaling。
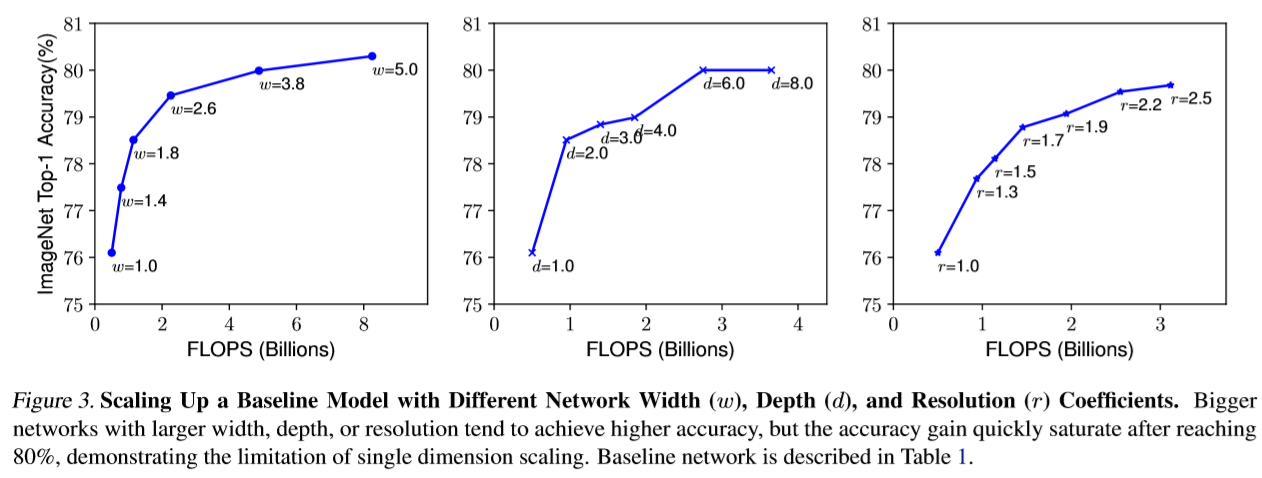
首先针对某个分类网络的3个维度(宽度、深度和分辨率)分别做model scaling的结果对比。显然,单独优化这3个维度都能提升模型效果,但上限也比较明显,基本上在Acc达到80后提升就很小了。
接下来,作者采用的实验方法是固定其中两个维度,每次调整其中一个维度,对前两个维度的不同组合重复实验:
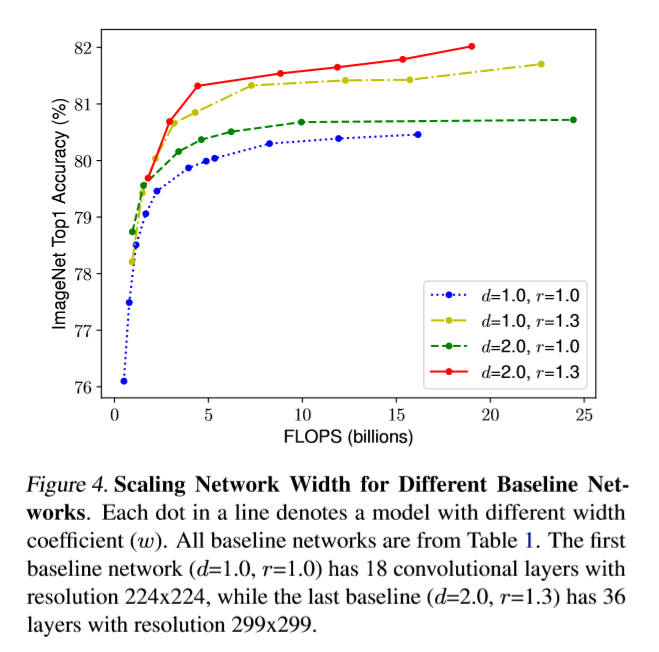
可以看到,通过手动设置3个维度的 model scaling 参数就能有效提升模型的效果(突破80),这就说明多维度融合是有效的。
基于以上观察,作者提出了compound model scaling 算法。
depth: $d=\alpha^{\phi}$
width: $w=\beta^{\phi}$
resolution: $r=\gamma^{\phi}$
s.t. $\alpha \cdot \beta^{2} \cdot \gamma^{2} \approx 2$
$\alpha \geq 1, \beta \geq 1, \gamma \geq 1$
基于算法设计了一个 baseline 网络,也就是 EfficientNet-B0。
在最后的实验中,作者将 compound model scaling 算法应用在其他现有的分类模型中,发现同样有效,说明泛化效果还不错。
EfficientDet: Scalable and Efficient Object Detection
神经网络的速度和精度之间存在权衡。
EfficientDet 分为 EfficientDet D1~ EfficientDet D7,速度逐渐变慢,但是精度也逐渐提高。
文章的两大主要贡献:BiFPN,Compound Scaling。
BiFPN
Cross-Scale Connections
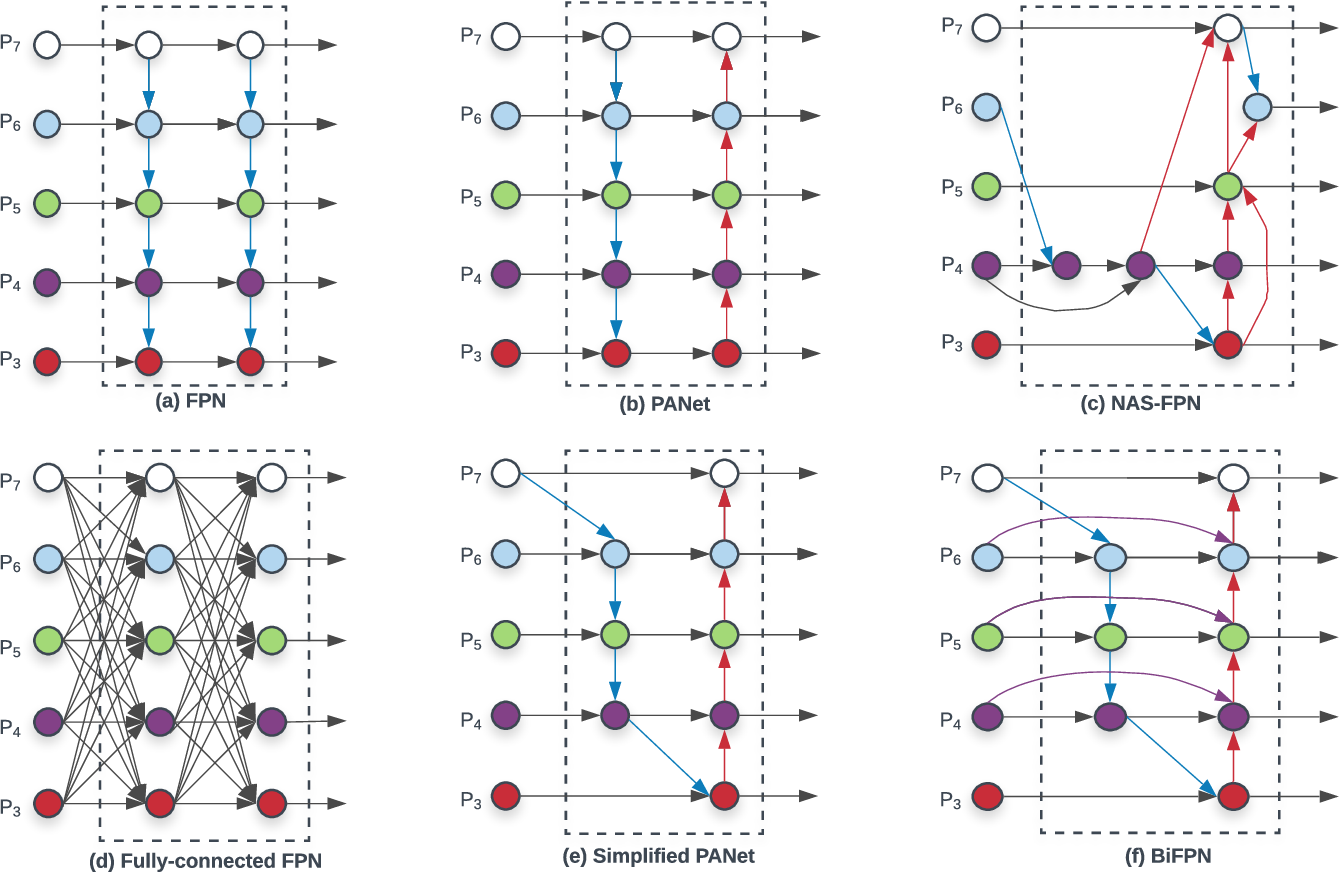
上图展示了从 FPN 到 BiFPN的构思过程。基于 CVPR 2017 提出的 FPN 对不同层进行特征融合的思路,很多人在此基础上做了不同的改进,基本就是改进连接方式。比如 PANet 在 FPN 自上而下融合的基础上,又增加了自下而上融合的操作。
作者对不同连接方法进行了观察:
- PANet 效果好于 FPN,NAS-FPN,然而计算量更大;
- 从 PANet 出发试图降低计算量,因此假设只有一个输入的节点相对不太重要,因而移除了入度为1的节点,得到 (e) Simplified PANet 的结果;
- 假设相同层的输入输出节点之间增加一条 edge 可以融合更多特征,得到 (f) BiFPN 的结果(直观上理解,这么做实际上增加了特征融合时这一层原始特征的权值);
- 作者认为先从下往上连,再从上往下连,这个基本结构可以用作一个基本模块,构建重复结构,而重复次数就是一个速度与精度的 trade-off。
最终,BiFPN 的效果是:相对于 FPN,在 COCO 上的 mAP 上涨了 0.4,而参数量和计算量下降。
Weighted Feature Fusion
作者提出,FPN采用的相邻层之间的直接上采样并相加的特征融合方式不合理。作者观察发现,由于不同的输入特征有不同的分辨率,它们对输出特征的贡献是不相同的。
因此,作者提出对每个输入增加一个额外的权重,让网络去学习每个特征的重要程度。
Compound Scaling
Model Scaling 指的是人们经常根据资源的限制,对模型进行调整。比如说为了把 backbone 部分 scale up,得到更大的模型,就会考虑把层数加深,比如 Res50 -> Res101 这种;或者把输入图的分辨率提高。
EfficientDet 直接将 EfficientNet 作为其backbone,通过使用 EfficientNet B0~B6,控制 backbone 的规模,以及其他的参数:
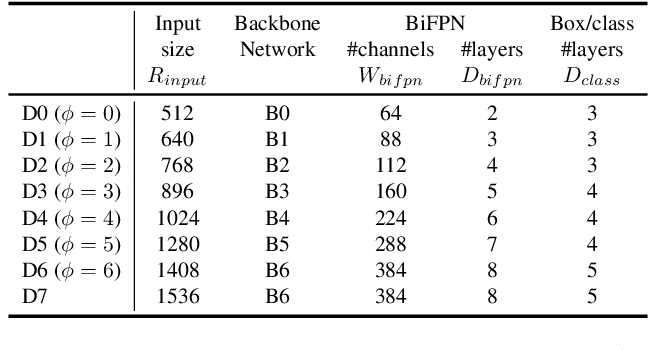
包括 input size,BiFPN 的 channels 和 layers,每个 class 分配的 box 数量。